User Guide#
Practical, task-focused guides for building and running IR-SIM scenarios. Browse the highlights below, or jump to any page from the contents.
Make environment
Build a world and drive the step → render → done loop.
Robots & obstacles
Add robots and obstacles with different kinematics and shapes.
Sensors
Attach 2D LiDAR, FMCW LiDAR, and field-of-view detectors.
Behaviors
dash, RVO, ORCA, and Social Force Model behaviors.
Keyboard & mouse
Drive and interact with robots by keyboard or mouse.
Social Force Model
Pedestrian-style crowd navigation with the Social Force Model.
Grid maps
Build occupancy grids from images or Perlin noise.
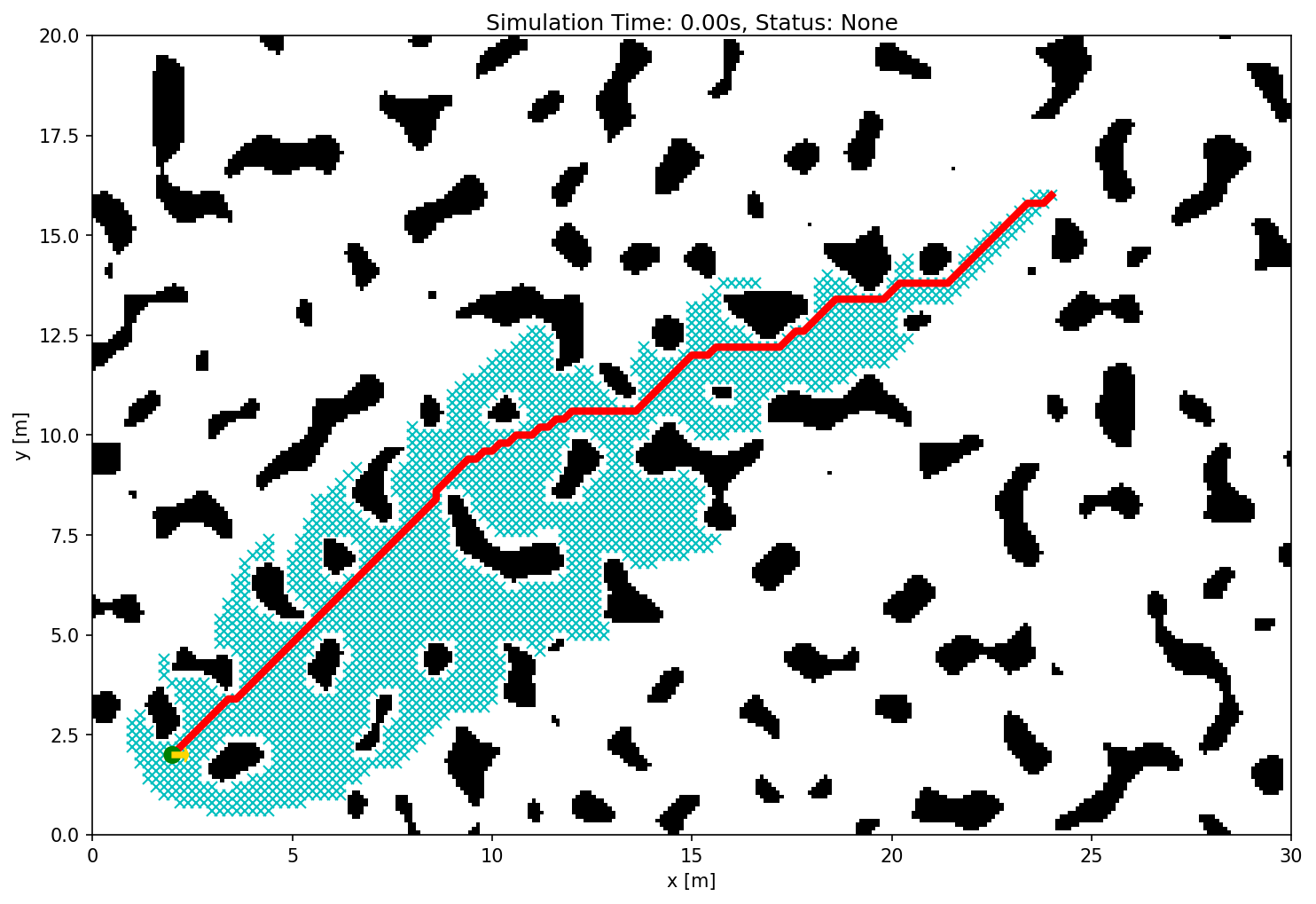
Path planning
Plan collision-free paths with A*, JPS, RRT, RRT*, and PRM.
Dynamic scenes
Spawn randomized dynamic obstacles on every run.
Contents#
Basic Usage