配置网格地图环境#
网格地图环境是基于二维栅格的场景,可用于模拟多种情形。只需在 YAML 配置中指定图像文件路径即可完成配置。
网格地图配置参数#
下方给出了网格地图环境的 Python 脚本与 YAML 配置:
import irsim
env = irsim.make()
for i in range(1000):
env.step()
env.render(0.05)
if env.done():
break
env.end()
world:
height: 50
width: 50
obstacle_map: 'cave.png'
mdownsample: 2
robot:
- kinematics: {name: 'acker'}
shape: {name: 'rectangle', length: 4.6, width: 1.6, wheelbase: 3}
state: [5, 5, 0, 0]
goal: [40, 40, 0]
vel_max: [4, 1]
plot:
show_trail: True
traj_color: 'g'
show_trajectory: True
show_goal: False
sensors:
- name: 'lidar2d'
range_min: 0
range_max: 20
angle_range: 3.14
number: 100
alpha: 0.4
obstacle:
- number: 10
distribution: {name: 'manual'}
shape:
- {name: 'polygon', random_shape: true, center_range: [5, 10, 40, 30], avg_radius_range: [0.5, 2]}
关键参数说明#
配置网格地图需要在 world 部分指定 obstacle_map。mdownsample 用于对图像降采样以加速。cave.png 图像需与 Python 脚本位于同一目录,效果如下:
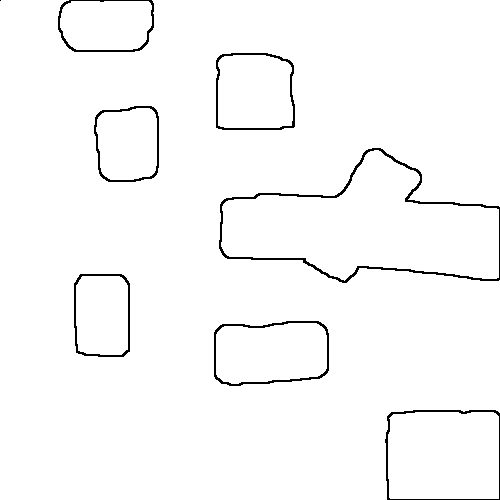
仿真时该 PNG 会被栅格化为地图:黑色像素代表障碍物,白色像素代表可通行区域。
小技巧
你可使用自定义 PNG 图像创建不同的网格地图,并通过绝对或相对路径引用位于其他目录的图像文件。